|
|
OpenVolumeMesh
|
|
|
OpenVolumeMesh
|
The concepts of OpenVolumeMesh are closely related to those of OpenMesh (http://www.openmesh.org). For further reading on the concepts of OpenMesh, refer to Botsch02OpenMesh. OpenMesh is used to handle two-manifold geometric meshes. For this purpose, it distinguishes between vertices, edges, and faces. The main idea in OpenMesh is to represent the edges as a pair of so-called half-edges that have opposing orientations. Additional local incidence information is stored for each half-edge such that the navigation on the mesh can be completely accomplished by using only these local links to adjacent structures (similar to e.g. a linked list). This, of course, assumes the surface mesh to be two-manifold.
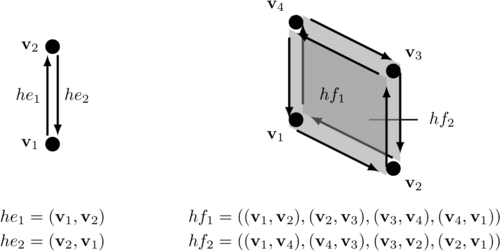
The main concept of OpenVolumeMesh is slightly different but shares some of its ideas with OpenMesh. In order to represent volumetric meshes (three-manifolds) that consist of a set of polyhedra, OpenVolumeMesh extends the set of entities by cells. But unlike in the original idea of half-edge data structure, in OpenVolumeMesh all entities are stored in arrays (STL vectors) rather than in incidence linked lists. This is why OpenVolumeMesh is index-based which has the major advantage that the data structure can handle configurations that are not three-manifold (since this is desired in some applications). For example, a set of vertices or just a two-manifold surface can be respresented by OpenVolumeMesh as well as an entirely three-manifold polyhedral mesh. In order to offer the possibility to locally navigate on the meshes, we carry over the idea of splitting edges into half-edges to the faces. This leads to the separation of the faces into pairs of so-called half-faces. Each of the half-faces has opposite orientation to its counter-part and can be either incident to a cell or not which makes the half-face a boundary half-face. The orientation of a half-face is uniquely determined by its incident half-edges. See Figure 1 for an illustration of this concept.
The entities in OpenVolumeMesh are arranged hierarchically and we distinguish between two incidence relations:
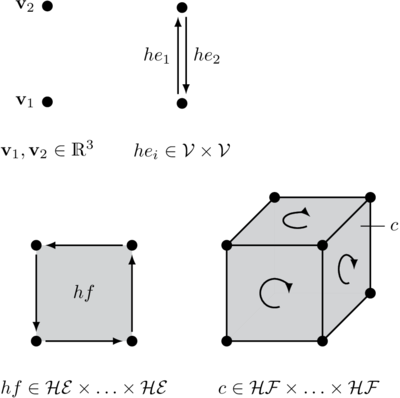
Each entity of dimension n is defined as a tuple of entities of dimension n-1, except for the vertices. So, edges are defined as a pair of vertices, (half-)faces are defined as a j-tuple of (half-)edges, where j is the valence of the face, and cells are defined as a k-tuple of (half-)faces, where k is the valence of the cell. This incidence relation is intrinsically given by definition. OpenVolumeMesh can use these incidences in order to provide top-down circulators, that is circulators that address all adjacent lower-dimensional entities of a given reference entity. Read more on iterators and circulators in Section Iterators and Circulators. Figure 2 illustrates this hierarchy.
In many cases, the incidence list to higher dimensional entities for a given entity is required. Therefore, OpenVolumeMesh offers the opportunity to explicitly compute the so-called bottom-up incidences. For this, OpenVolumeMesh stores the following information for the respective entity type in additional caches:
These incidence relations are computed automatically for each affected entity when adding/deleting it. In most cases these incidences are needed since many iterators/circulators rely on them. Storing this additional information consumes extra memory that scales linearly with the mesh's complexity. However, in case these incidence relations are not needed (e.g. in numerical analysis applications, etc.), they can be disabled by calling TopologyKernel::enable_bottom_up_incidences() and passing false as parameter. Also it is possible to enable bottom-up incidences for single entity types, just call the following functions:
This is useful in cases where only a subset of these incidence relations is required while at the same time keeping the data structure as compact as possible allocating only a minimum of storage overhead.
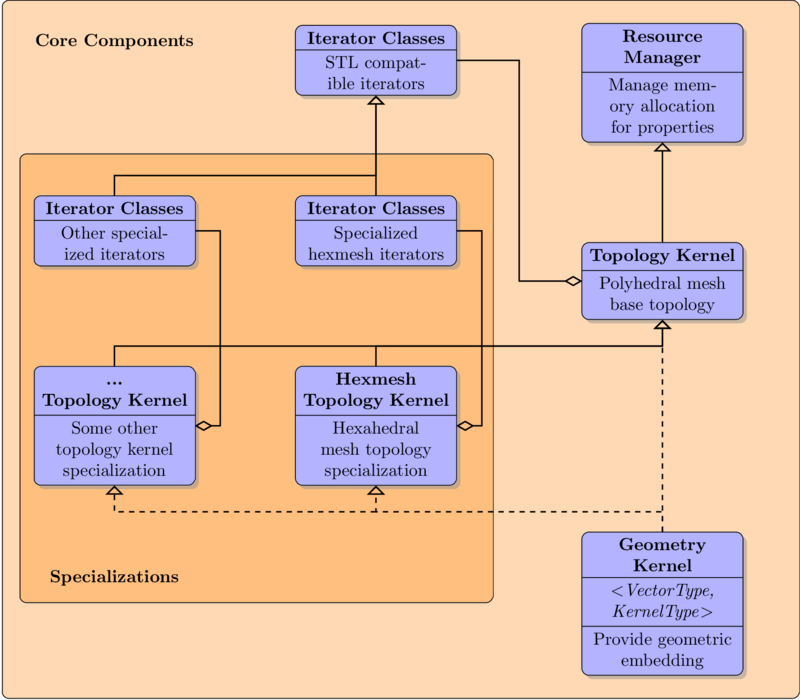
There exist numerous applications for volumetric mesh data structures including mesh generation, finite element analysis, rendering, etc. Each of them focussing on different design goals such as maximum efficiency, compactness or comfortable navigation. Since our data structure claims to be versatile, it is designed to be as modular as possible such that it suits many of the mentioned application cases. Figure 3 shows the class diagram of the core components of OpenVolumeMesh. With this architecture it is possible to only instanciate what is really needed in a particular use case. For instance, we make a clear distinction between the geometry and topology of a mesh, such that the choice of whether a mesh (graph) requires a geometric embedding or not is up to the user. This may save a lot of unnecessary memory overhead in cases where only topological information of a mesh is needed. The topology kernel implements only a minimal set of (intrinsic) operations on a mesh such as adding/deleting entities, computing incidence relations and instantiate iterator objects. All other additional functions are provided by the so-called attribute classes which are presented in the next section.
OpenVolumeMesh is an index-based data structure where generally all entities are stored in linear memory arrays (STL vectors). So, each of the entities is uniquely defined through its handle which is a simple class that encapsulates the index of it in the respective array it is stored in. This makes sure the entities can be accessed in  . Each of the distinct entity types has its own type-safe handle class in order to avoid ambiguity when accessing elements at compile time. The handle classes are each derived from a common base class called OpenVolumeMesh::OpenVolumeMeshHandle. The iterators as well as the circulators are designed to return a handle to an entity on dereference rather than a reference to the entity itself. A special constant, OpenVolumeMesh::TopologyKernel::InvalidVertexHandle, etc., for each entity is used when trying to access non-existing entities.
. Each of the distinct entity types has its own type-safe handle class in order to avoid ambiguity when accessing elements at compile time. The handle classes are each derived from a common base class called OpenVolumeMesh::OpenVolumeMeshHandle. The iterators as well as the circulators are designed to return a handle to an entity on dereference rather than a reference to the entity itself. A special constant, OpenVolumeMesh::TopologyKernel::InvalidVertexHandle, etc., for each entity is used when trying to access non-existing entities.
The OpenVolumeMesh library is designed to be as generic as possible. So, at one hand, the developer can choose the vector space into which a mesh is embedded. For example, most instances require their vertices being elements of  . But in some cases, one might want e.g. two-dimensional integer coordinates, so elements in
. But in some cases, one might want e.g. two-dimensional integer coordinates, so elements in  . In OpenVolumeMesh, the embedded vector type can be specified as template parameter. The library is shipped with a vector class that also specifies all necessary operations on vectors (such as dot- and cross-product, several norms, etc.). The most common vector types are predefined in VectorT.hh. So, let's say we want to create a polyhedral mesh whose vertices are elements of . We use the following code:
. In OpenVolumeMesh, the embedded vector type can be specified as template parameter. The library is shipped with a vector class that also specifies all necessary operations on vectors (such as dot- and cross-product, several norms, etc.). The most common vector types are predefined in VectorT.hh. So, let's say we want to create a polyhedral mesh whose vertices are elements of . We use the following code:
Similar to the OpenMesh data structure, it is possible to attach multiple dynamic properties to any of the entities in OpenVolumeMesh at run-time. The underlying property container class makes use of C++ template programming concepts in order to allow the encapsulated property data to be of any data type. However, we have adapted and improved the property concept of OpenMesh such that the allocation of properties is now completely managed by a resource manager implemented in OpenVolumeMesh::ResourceManager. Properties are now allocated and returned as a shared pointer that automatically are destroyed and entirely released once they loose scope. This drastically improves the ease-of-use at one hand and demands less care about memory management at the other hand. Nevertheless, properties may also (in analogy to the property system of OpenMesh) be declared persistent. When declaring a property persistent, the ownership of the property memory is given back to the mesh (from the user context) which makes sure it is not destroyed before the mesh is. Let's assume, we want to attach a label to the vertices and some real valued weight to the edges of a mesh. Consider the following example code:
Due to the fact that OpenVolumeMesh is designed to be as compact as possible providing the opportunity to only use code that is really needed in a particular case, all extra functionality can be suspended to so-called attribute classes. In this context, attributes are not to be understood as those used in the C++ STL concepts. Attribute objects in OpenVolumeMesh are objects instanciated at run-time which expect a mesh reference to be injected. Usually they request a certain set of properties from the mesh and provide functions that allow operating on these properties or the mesh itself. The major advantage of the use of these attributes is that they exclusively use additional memory during their life-time cycle. As soon as an attribute object looses scope and is thus destroyed, all allocated memory is automatically released again. The following lines of code show how to use attributes (in this case the status attribute providing functions for selecting, tagging and deleting entities):

